|
|


(例12)
特許第4353192号
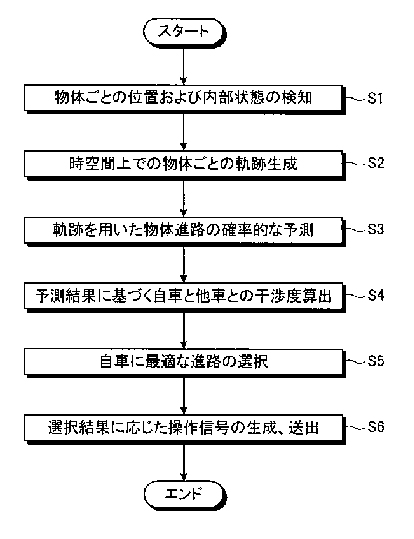
本件は、車両の自動運転を実現するために、自車両の周囲に存在する車両、歩行者、または障害物などを正確に検知し、自車両が取りうる進路と他車両などが取りうる進路とを予測することによって自車両が採るべき進路を設定するための進路設定方法に関するものです。
【請求項1】
複数の物体の位置と各物体の速度を含む内部状態とを少なくとも記憶する記憶手段を備
えたコンピュータが、前記複数の物体に含まれる特定の物体が取りうる進路とその他の物
体が取りうる進路とを予測することによって前記特定の物体が取るべき進路を設定する進
路設定方法であって、
前記複数の物体の位置および内部状態を前記記憶手段から読み出し、この読み出した前
記物体の位置および内部状態に基づいて、前記複数の物体の各々が時間の経過とともに取
りうる位置の変化を時間および空間から構成される時空間上での軌跡としてそれぞれ生成
する軌跡生成ステップと、
前記軌跡生成ステップで生成した軌跡を用いることによって前記複数の物体の進路の確
率的な予測をそれぞれ行う予測ステップと、
前記予測ステップで予測した結果に基づいて、前記特定の物体が取りうる進路と前記そ
の他の物体が取りうる進路との干渉の程度を定量的に示す干渉度を算出する干渉度算出ス
テップと、
前記干渉度算出ステップで算出した干渉度に応じて前記特定の物体が取るべき進路を選
択する進路選択ステップと、
を有し、
前記進路選択ステップは、
前記干渉度に応じて選択した進路が複数ある場合、この複数の進路の中から所定の付加
選択基準に最も適合する進路を選択することを特徴とする進路設定方法。
|
|
|